Кровать-робот: когда больничная койка сама ездит
Зачем вообще моторизовать больничные кровати?
Кажется, ну что такого — взять и прокатить кровать по коридору. Но на практике:
-
Больничные кровати, особенно с оборудованием и пациентом, очень тяжёлые.
-
Перемещение приходится делать вручную — и это нагрузка на спину, на мышцы у медперсонала.
-
Иногда нужны точные манёвры, повороты, объезд препятствий — традиционные колёса не всегда справляются.
-
Идея: если добавить мотор и “уметь” ездить как робот, то можно освободить рабочие руки, снизить риск травм, повысить скорость перемещения.
Поэтому ключевой вопрос: какие колёса и привод лучше всего подходят, чтобы кровать стала “умной”, мобильной и безопасной?
Типы колёс
В обзоре рассматриваются сразу несколько видов колёс, применимых к “роботизированной” кровати. Давайте пройдёмся:
- Обычные (конвенциональные) колёса. Простые круглые колёса, вращающиеся вокруг своей оси, как автомобильные, иногда два или четыре, приводятся в движение мотором.
- Колёса типа Mecanum. Колёса с роликами, установленными под углом (часто 45°), что даёт возможность двигаться не только вперёд / назад, но и в бок, диагонали.
- Omniwheel (универсальное колесо). Похожи на Mecanum, но устроены чуть иначе: ролики располагаются перпендикулярно основному колесу, дают боковое движение
- Swerve drive / поворотные (модульные) колёса. Каждый модуль колеса может не только крутиться, но и поворачиваться, давая почти “холономное” движение — можно развернуться, двигаться в любом направлении.
- Пятое моторизированное колесо (“fifth wheel”). Добавляют ещё одно ведущие моторное колесо к уже имеющейся конструкции (4 обычных колеса + одно активное).
Даже поверхностный взгляд позволяет увидеть: нет одного “универсального” решения, всё зависит от требований: пространства, поверхности, точности, стоимости.
Приводы и схемы движения (drivetrain)
Выбранные колёса — это половина дела, важно ещё как они приводятся в движение и управляются. Рассматривают типы приводов:
-
Car drive (как в автомобиле) — простое направление + руль. Работает, когда трассы прямые и нет нужды в боковом движении.
-
Skid-steer — движение через разницу скоростей колёсных блоков (как у гусеничной техники) — позволяет разворот “на месте”.
-
Holonomic drive — используя omnidrive / omniwheels, даёт возможность двигаться в любом направлении без перестановки колёс.
-
Swerve drive — каждый колесной модуль может поворачиваться и быть приводимым в движение — сочетает манёвренность и гибкость.
Выбирать привод — это как выбирать характер твоего “роботизированного друга”: хочешь, чтобы просто катался по прямой — бери простое. Хочешь, чтобы он танцевал между кроватями — бери swerve / holonomic.
Реальные технологии и прототипы, что уже есть
Авторы не просто рассуждают — они смотрят на реальные реализации и проекты:
-
Роботизированные кровати: есть прототипы с swerve drive, управлением, навигацией, обходом препятствий.
-
Модификация существующих кроватей через пятое моторизированное колесо — как “надстройка” к обычной кровати.
-
Bed mover (устройство для перемещения кровати) — будто “тягач”, присоединяемый к уже существующей кровати, и он ведёт её за собой.
-
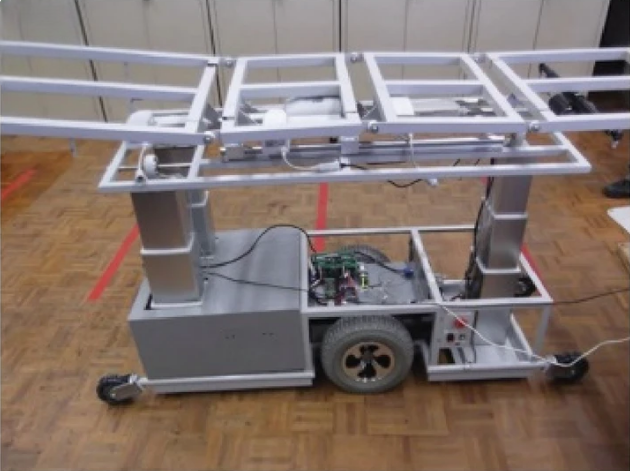
Некоторые прототипы используют 3D-печать (PLA) деталей и моторы DC, чтобы сделать модули поворотных колёс.
Они также сравнивают технологии, выделяя, где каждая из них применима, какова нагрузочная способность, какова сложность изготовления, сколько управления требует.
Что они заключают (и к чему призывают)
В статье есть чёткие выводы и предложения для будущего:
-
Привод и выбор колёс — краеугольные решения в моторизации больничных кроватей.
-
Простая модернизация (например, пятое колесо) — шаг вперёд, но не решение всех задач.
-
Для полноценной автономной мобильности нужны более сложные модули, сенсоры, управление, навигация.
-
Вдохновение стоит брать из мира мобильных роботов, AGV / AMR (автоматизированные транспортёры), где технологии уже отработаны.
-
Нужно учитывать безопасность, устойчивость, отказоустойчивость, энергопотребление, простоту обслуживания.
-
В будущем: интеграция ИИ, сенсоров (LiDAR, инфракрасных, камер), планирование маршрутов, умные интерфейсы, связь с инфраструктурой «умной больницы».
Что можно почерпнуть лично — идеи и “на заметку”
Когда читаешь такое, вспоминаешь: технологии уже проникают во всё, и больничная инфраструктура — не исключение. Вот что можно вынести, если захочешь что-то делать или предложить:
-
В проектах модернизации больничного оборудования — рассмотри возможность добавления модульных колесных узлов, а не полной замены кроватей.
-
При выборе технологии ориентируйся не только на “крутость” (omni, swerve), но и на надёжность, простоту ремонта, стоимость.
-
Тестируй на разных поверхностях: коридоры, ковры, пороги — чтобы выбор колёс был адекватен реальному пространству.
-
Интеграция с системой навигации, сенсорами, контроллерами — уже не “будущее”, а почти необходимость.
-
Обдумывай способы переключения между режимами: когда “робот” едет сам, когда управляет человек вручную.
-
Обращай внимание на стандарты безопасности, электропитание, запас энергии, резервные системы, аварийное торможение.
Источник: https://jeas.springeropen.com/articles/10.1186/s44147-024-00504-9